一致性hash算法和golang实现
当系统容量增多时,就会将数据水平切分到不同的节点来存储,也就是将数据分布到了不同的节点。
1. hash算法
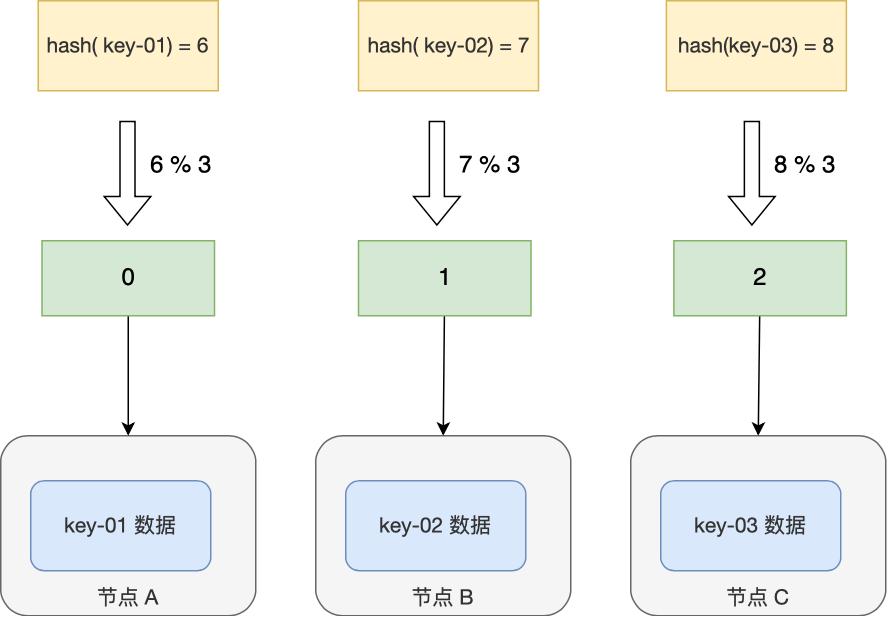
哈希算法最简单的做法就是进行取模运算,比如分布式系统中有 3 个节点,基于 hash(key) % 3 公式对数据进行了映射。
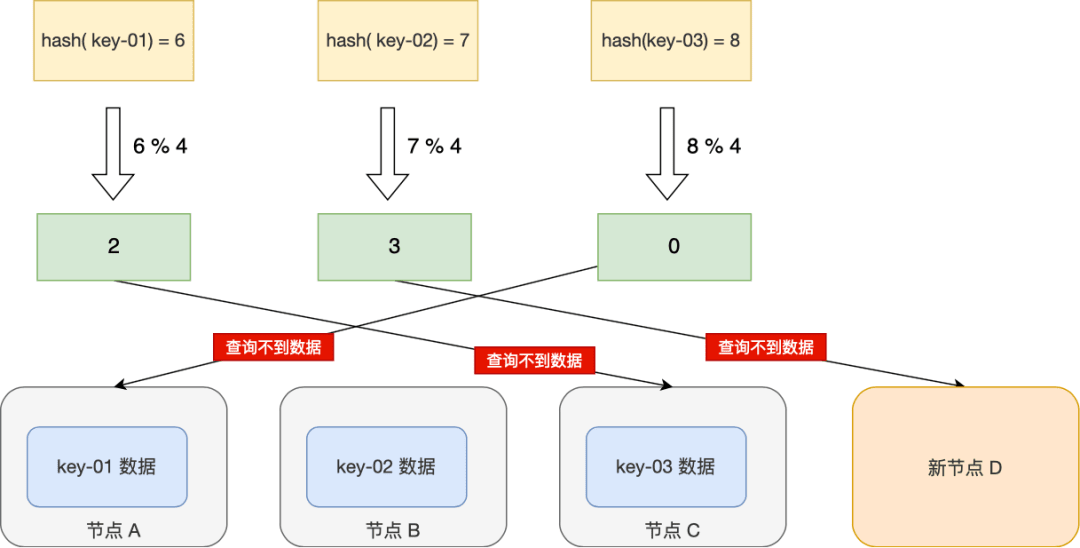
但是有一个很致命的问题,如果节点数量发生了变化,也就是在对系统做扩容或者缩容时,必须迁移改变了映射关系的数据,否则会出现查询不到数据的问题。
假设总数据条数为 M,哈希算法在面对节点数量变化时,最坏情况下所有数据都需要迁移,所以它的数据迁移规模是 O(M),这样数据的迁移成本太高了。
2. 一致性hash算法
一致哈希算法也用了取模运算,但与哈希算法不同的是,哈希算法是对节点的数量进行取模运算,而一致哈希算法是对 2^32 进行取模运算,是一个固定的值。
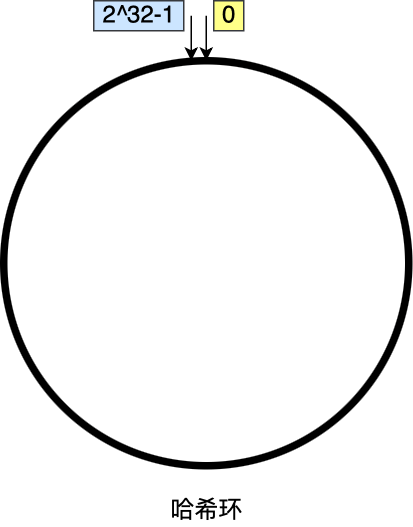
我们可以把一致哈希算法是对 2^32 进行取模运算的结果值组织成一个圆环,就像钟表一样,钟表的圆可以理解成由 60 个点组成的圆,而此处我们把这个圆想象成由 2^32 个点组成的圆,这个圆环被称为哈希环,如下图:
一致性哈希要进行两步哈希:
- 第一步:对存储节点进行哈希计算,也就是对存储节点做哈希映射,比如根据节点的 IP 地址进行哈希;
- 第二步:当对数据进行存储或访问时,对数据进行哈希映射;
所以,一致性哈希是指将「存储节点」和「数据」都映射到一个首尾相连的哈希环上。
问题来了,对「数据」进行哈希映射得到一个结果要怎么找到存储该数据的节点呢?答案是,映射的结果值往顺时针的方向的找到第一个节点,就是存储该数据的节点。
2.1 增删节点
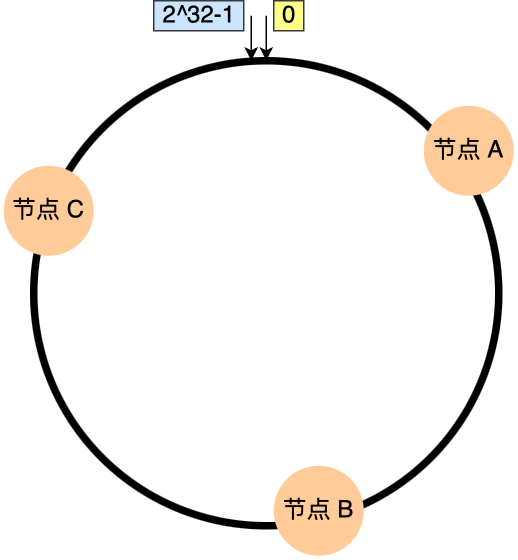
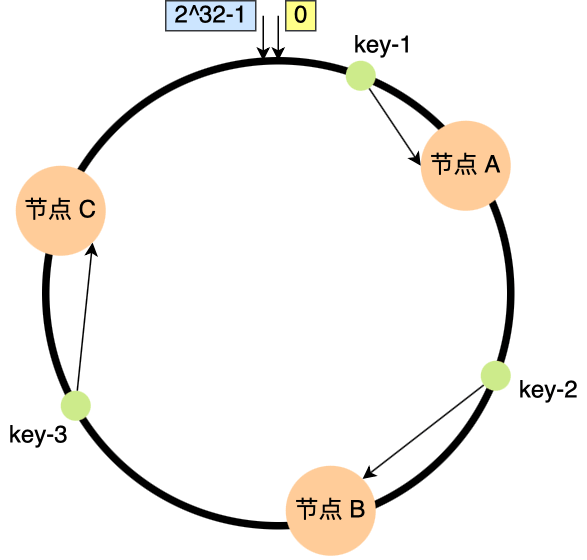
举个例子,有 3 个节点经过哈希计算,映射到了如下图的位置:
接着,对要查询的 key-01 进行哈希计算,确定此 key-01 映射在哈希环的位置,然后从这个位置往顺时针的方向找到第一个节点,就是存储该 key-01 数据的节点。
比如,下图中的 key-01 映射的位置,往顺时针的方向找到第一个节点就是节点 A。
所以,当需要对指定 key 的值进行读写的时候,要通过下面 2 步进行寻址:
首先,对 key 进行哈希计算,确定此 key 在环上的位置;
然后,从这个位置沿着顺时针方向走,遇到的第一节点就是存储 key 的节点。
知道了一致哈希寻址的方式,我们来看看,如果增加一个节点或者减少一个节点会发生大量的数据迁移吗?
假设节点数量从 3 增加到了 4,新的节点 D 经过哈希计算后映射到了下图中的位置:
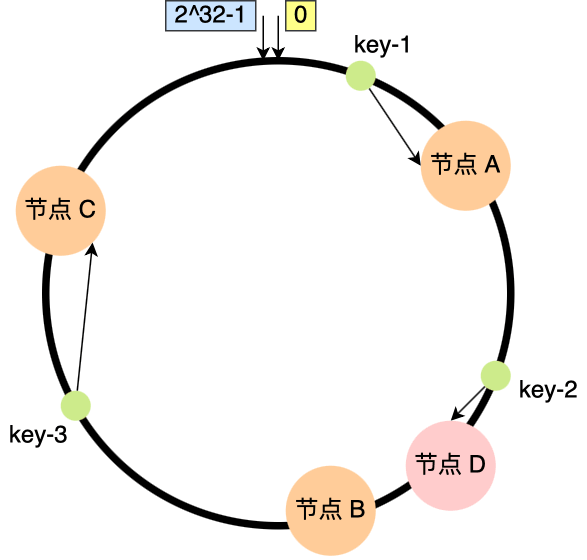
我们可以看到,key-01、key-03 都不受影响,只有 key-02 需要被迁移节点 D。
假设节点数量从 3 减少到了 2,比如将节点 A 移除:
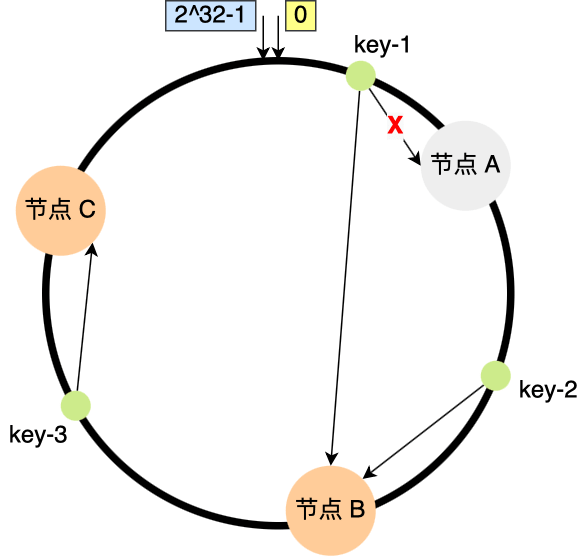
你可以看到,key-02 和 key-03 不会受到影响,只有 key-01 需要被迁移节点 B。
因此,在一致哈希算法中,如果增加或者移除一个节点,仅影响该节点在哈希环上顺时针相邻的后继节点,其它数据也不会受到影响。
2.2 均衡性
但是一致性哈希算法并不保证节点能够在哈希环上分布均匀,这样就会带来一个问题,会有大量的请求集中在一个节点上。
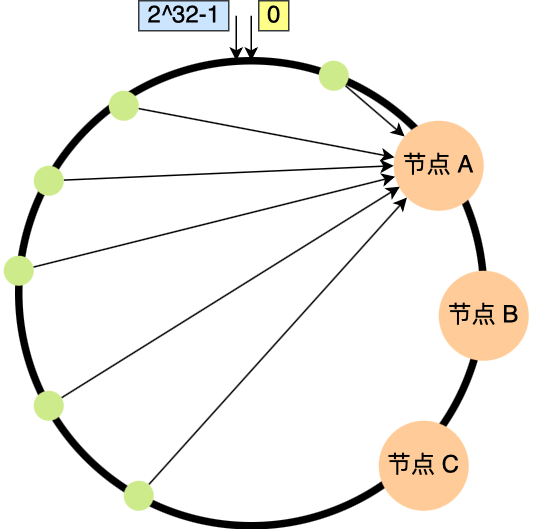
这时候有一半以上的数据的寻址都会找节点 A,也就是访问请求主要集中的节点 A 上,这肯定不行的呀,说好的负载均衡呢,这种情况一点都不均衡。
比如,上图中如果节点 A 被移除了,当节点 A 宕机后,根据一致性哈希算法的规则,其上数据应该全部迁移到相邻的节点 B 上,这样,节点 B 的数据量、访问量都会迅速增加很多倍,一旦新增的压力超过了节点 B 的处理能力上限,就会导致节点 B 崩溃,进而形成雪崩式的连锁反应。
所以,一致性哈希算法虽然减少了数据迁移量,但是存在节点分布不均匀的问题。
但问题是,实际中我们没有那么多节点。所以这个时候我们就加入虚拟节点,也就是对一个真实节点做多个副本。
具体做法是,不再将真实节点映射到哈希环上,而是将虚拟节点映射到哈希环上,并将虚拟节点映射到实际节点,所以这里有「两层」映射关系。
比如对每个节点分别设置 3 个虚拟节点:
- 对节点 A 加上编号来作为虚拟节点:A-01、A-02、A-03
- 对节点 B 加上编号来作为虚拟节点:B-01、B-02、B-03
- 对节点 C 加上编号来作为虚拟节点:C-01、C-02、C-03
引入虚拟节点后,原本哈希环上只有 3 个节点的情况,就会变成有 9 个虚拟节点映射到哈希环上,哈希环上的节点数量多了 3 倍。
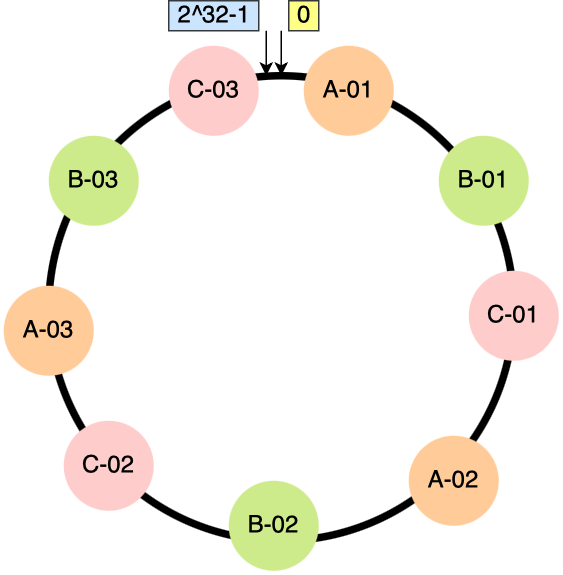
你可以看到,节点数量多了后,节点在哈希环上的分布就相对均匀了。这时候,如果有访问请求寻址到「A-01」这个虚拟节点,接着再通过「A-01」虚拟节点找到真实节点 A,这样请求就能访问到真实节点 A 了。
上面为了方便你理解,每个真实节点仅包含 3 个虚拟节点,这样能起到的均衡效果其实很有限。而在实际的工程中,虚拟节点的数量会大很多,比如 Nginx 的一致性哈希算法,每个权重为 1 的真实节点就含有160 个虚拟节点。
比如,当某个节点被移除时,对应该节点的多个虚拟节点均会移除,而这些虚拟节点按顺时针方向的下一个虚拟节点,可能会对应不同的真实节点,即这些不同的真实节点共同分担了节点变化导致的压力。
3. golang实现
https://github.com/golang/groupcache/blob/master/consistenthash/consistenthash.go
1 | package consistenthash |
https://github.com/golang/groupcache/blob/master/consistenthash/consistenthash_test.go
1 | func TestHashing(t *testing.T) { |
4. 总结
- 轮询这类的策略只能适用与每个节点的数据都是相同的场景,访问任意节点都能请求到数据。但是不适用分布式系统,因为分布式系统意味着数据水平切分到了不同的节点上,访问数据的时候,一定要寻址存储该数据的节点。
- 哈希算法虽然能建立数据和节点的映射关系,但是每次在节点数量发生变化的时候,最坏情况下所有数据都需要迁移,这样太麻烦了,所以不适用节点数量变化的场景。
- 一致性哈希是指将「存储节点」和「数据」都映射到一个首尾相连的哈希环上,如果增加或者移除一个节点,仅影响该节点在哈希环上顺时针相邻的后继节点,其它数据也不会受到影响。
- 为了解决一致性哈希算法不能够均匀的分布节点的问题,就需要引入虚拟节点,对一个真实节点做多个副本。不再将真实节点映射到哈希环上,而是将虚拟节点映射到哈希环上,并将虚拟节点映射到实际节点,所以这里有「两层」映射关系。